ZLTECH 24V-48V DC 30A CAN RS485 ронандаи назораткунандаи мотори servo барои мошини CNC





Ронандаи серво як қисми муҳими идоракунии муосири ҳаракат аст ва дар таҷҳизоти автоматикунонӣ, ба монанди роботҳои саноатӣ ва марказҳои коркарди CNC васеъ истифода мешавад.Технологияи ронандагии серво, ҳамчун яке аз технологияҳои калидии идоракунии асбобҳои CNC, роботҳои саноатӣ ва дигар мошинҳои саноатӣ, дар солҳои охир таваҷҷуҳи васеъ пайдо кардааст.
Драйвери серво протсессори сигнали рақамиро (DSP) ҳамчун ядрои назорат истифода мебарад, ки метавонад алгоритмҳои мураккаби идоракуниро амалӣ кунад ва рақамисозӣ, шабакасозӣ ва иктишофиро амалӣ кунад.Ҳамзамон, он дорои схемаҳои ошкор ва муҳофизати хатогиҳо, аз ҷумла шиддати аз ҳад зиёд, ҷараёнҳои аз ҳад зиёд, аз ҳад зиёд гармшавӣ, пастшиддат ва ғайра мебошад.
Идоракунии ронандаи серво мувофиқи объекти идоракунӣ аз берун ба дарун ба ҳалқаи мавқеъ, ҳалқаи суръат ва ҳалқаи ҷорӣ тақсим карда мешавад.Мутаносибан ронандаи серво инчунин метавонад режими назорати мавқеъ, режими назорати суръат ва режими назорати моментро дастгирӣ кунад.Реҷаи идоракунии драйверро бо чор роҳ додан мумкин аст: 1. Танзими миқдори аналогӣ, 2. Танзими дохилии танзими параметр, 3. Набз + танзими самт, 4. Танзими алоқа.
Татбиқи танзимоти дохилии танзими параметрҳо нисбатан кам аст ва он маҳдуд ва ба марҳила танзим карда мешавад.
Бартарии истифодаи танзими миқдори аналогӣ вокуниши зуд аст.Он дар бисёр ҳолатҳои дақиқ ва вокуниши баланд истифода мешавад.Камбудии он дар он аст, ки дрейфи сифр вуҷуд надорад, ки барои ислоҳ кардани хатогиҳо мушкилот меорад.Системаҳои сервоситаҳои аврупоӣ ва амрикоӣ бештар аз ин усул истифода мебаранд.
Назорати набз бо усулҳои умумии сигнал мувофиқ аст: CW/CCW (набзи мусбат ва манфӣ), набз/самт, сигнали марҳилаи A/B.Камбудии он вокуниши паст аст.Системаҳои servo Ҷопон ва Чин бештар ин усулро истифода мебаранд.
Танзими коммуникатсия дар айни замон усули маъмултарини назорат мебошад.Афзалиятҳои он танзими зуд, вокуниши зуд ва банақшагирии оқилонаи ҳаракат мебошанд.Усули маъмули танзими иртибот иртиботи автобус аст, ки ноқилҳоро содда мекунад ва протоколи иртибототи диверсификатсия низ ба муштариён интихоби бештар медиҳад.
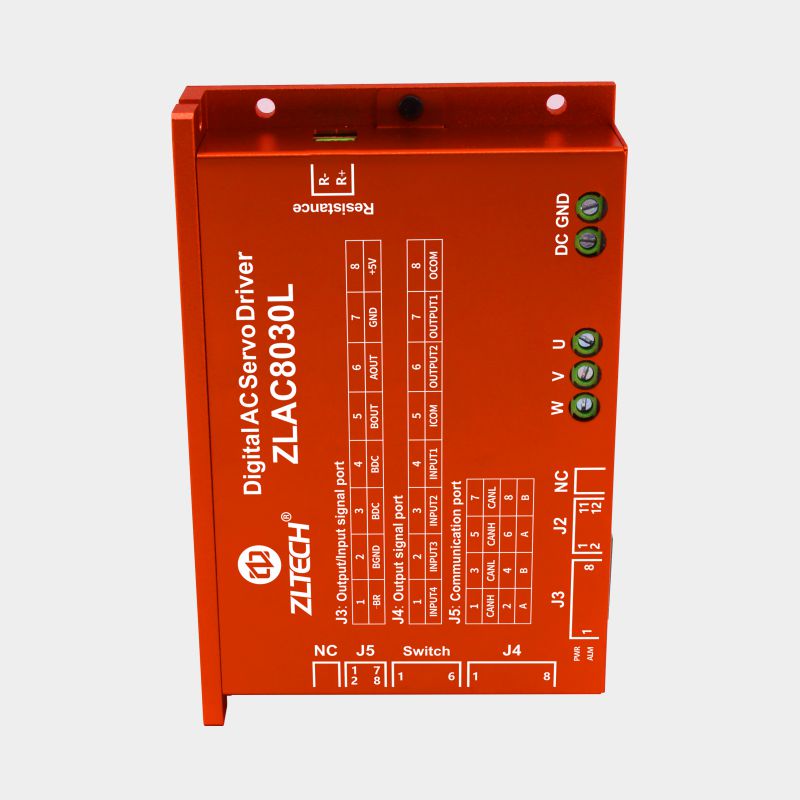
ZLAC8030 як ронандаи сервои рақамии пуриқтидор ва пастшиддат аст, ки мустақилона аз ҷониби худ таҳия шудааст.Системаи он дорои сохтори оддӣ ва интеграцияи баланд аст.Он алоқаи автобус ва функсияҳои контролери як меҳварро илова мекунад.Он асосан бо муҳаррикҳои серво 500W-1000W мувофиқат мекунад.
Параметрҳо
| НОМИ МАХСУЛОТ | РОНАНДАИ СЕРБО |
| P/N | ZLAC8030L |
| ШИДДАИ КОР (V) | 24-48 |
| ҶАРАЁНИ БАРОМАД(A) | 30А, МАКС 60А |
| УСУЛИ МУКОБИКА | CANOPEN, RS485 |
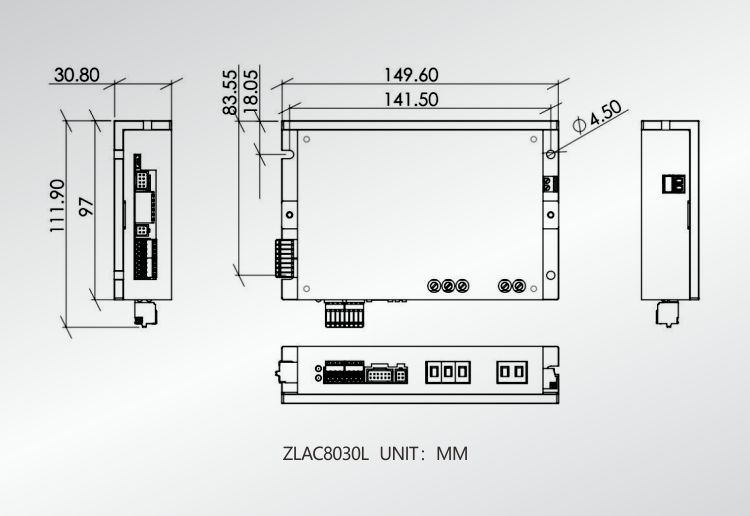
| Андоза (мм) | 149.5*97*30.8 |
| ХУБ МОТООРИ СЕРВО МУТОБИҚ | МОТООРИ СЕРВО ХУБИ КУВВАИ БАЛАНД |
Андоза
Ариза

Бастабандӣ

Дастгоҳи истеҳсолӣ ва санҷиш

Талабот ва сертификатсия

Офис & Фабрика

Хамкорй

Категорияҳои маҳсулот
-

ZLTECH 3фаза 60mm Nema24 24V 100W/200W/300W/40...
-

ZLTECH 42mm 24V 1.5A 0.5Nm CANopen интегралӣ ...
-

ZLTECH 6.5inch 24V-48V 150W 120kg BLDC барқ ...
-

ZLTECH 9.5inch 48V 20N.m муҳаррики маркази барои кишоварзӣ ...
-

Рамзгузори ZLTECH Nema23 CANopen қадамҳои ҳамгирошуда...
-

ZLTECH Nema17 0.5 / 0.7Nm 18V-36V қадами ҳамгирошуда ...





